
depth map of 3d coordnate
AR/VR 관련 논문을 읽다 심심찮게 나오는 depth map이라는 개념이 있다. 보통 kinect 같은 RGB-D 카메라로부터 얻을 수 있는데, 가끔씩 나 같은 사람을 포함해서 이 3차원 좌표(보통은 카메라 공간의 좌표)의 depth는 카메라 원점과 해당 3차원 좌표 사이의 distance(거리)라고 생각하는 사람들이 있다. 하지만 그게 아니다!
어떤 3차원 좌표의 depth란 카메라 공간 기준 z축에 평행한 카메라 원점이 있는 평면으로부터 마찬가지로 z축에 평행한 해당 좌표가 존재하는 평면까지의 수평 거리라고 생각하면 된다.
다음 그림을 보면 이해가 더 잘 갈 것이다.
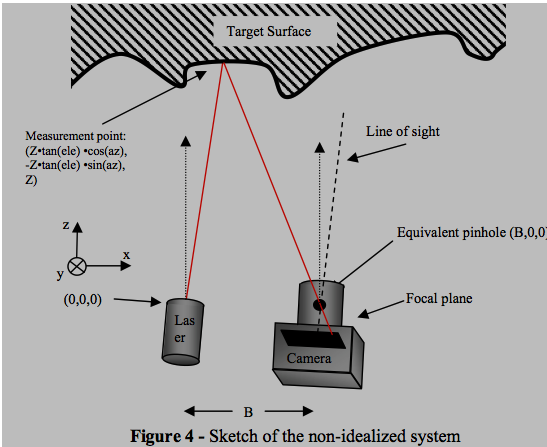
kinect sensor의 depth 측정 방법이다. Ray를 쏘아서 kinect 기기에 존재하는 receptor에서 어딘가에 맞고 돌아온 ray를 검출하는 방식으로 측정되는데, depth는 ray가 출발하여 receptor에서 검출되기까지의 시간에 비례하게 된다.
그림을 보면 카메라 공간 기준 $z=k$ 인 평면의 어느 점의 depth를 측정하던 간에 측정된 depth의 값은 동일할 것임을 알 수 있다. 저 움푹 패인 곳의 왼쪽 좌표를 측정하던 오른쪽 좌표를 측정하던 움푹 패인 곳의 평면이 카메라 공간 기준 z축과 수직인 평면이 된다면 측정되는 depth는 동일할 것이다.
그러므로 depth는 결국 카메라 공간 기준 $z=k$ 평면 위의 어떤 좌표에 대해서라도 모두 동일함을 알 수 있다.
결론 : depth와 원점에서 해당 좌표까지의 거리는 동치가 아니다!


댓글남기기